🌐
NeRF / 3DGS
NeRF / 3DGS
Inspect rendered views frame-by-frame as your radiance field trains. Adjust hyperparams with live sliders.
逐帧检查辐射场训练中的渲染视图,通过滑条实时调整超参数。
🎨
Differentiable Rendering
可微渲染
Display rendered images, gradient maps, and error heatmaps side-by-side. Data never leaves the GPU.
并排显示渲染图、梯度图与误差热力图。数据全程不离开 GPU。
🐍
Reinforcement Learning
强化学习
Watch DQN agents learn Snake in real time. Visualize Q-value heatmaps, reward curves, exploration.
实时观看 DQN 智能体学习贪吃蛇。可视化 Q 值热力图、奖励曲线、探索策略。
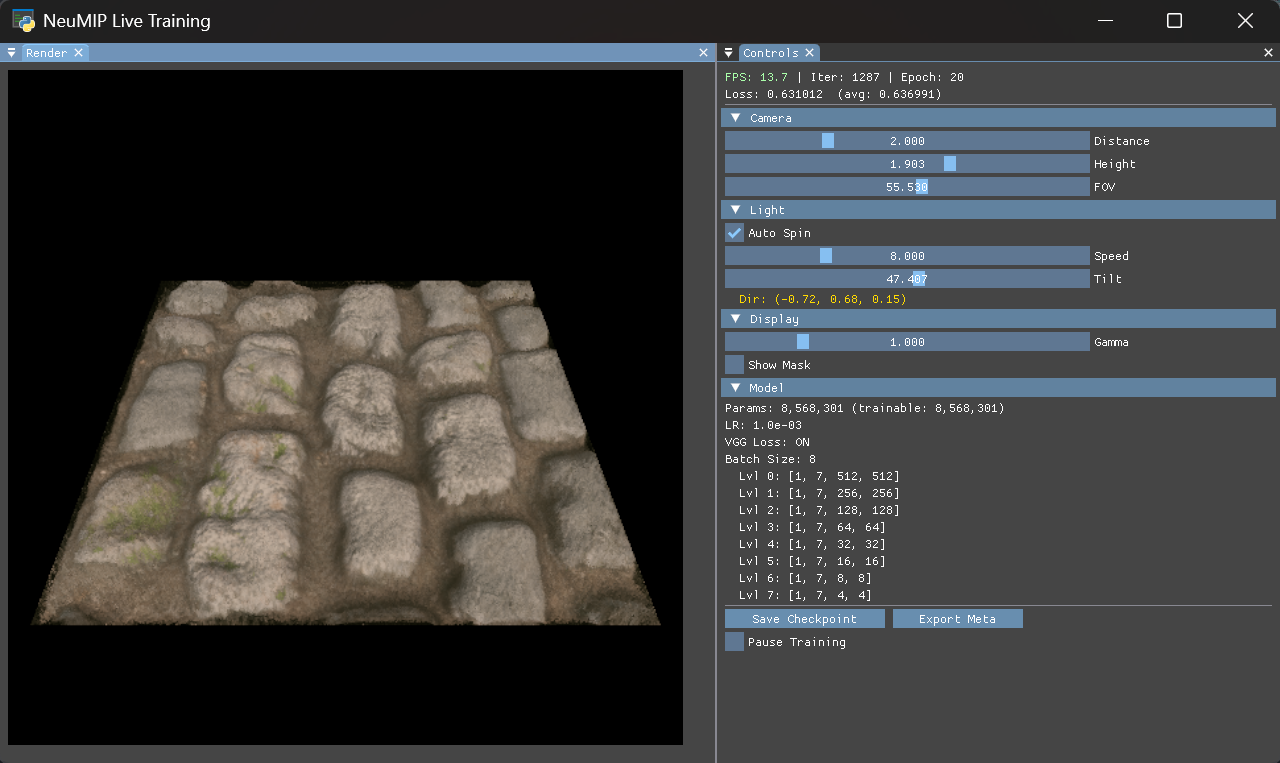
🧊
Neural Textures
神经纹理
Watch textures converge and spot artifacts during training without saving intermediate PNGs.
训练过程中实时观察纹理收敛、发现伪影,无需保存中间图片。
🔬
Live Hyperparameter Tuning
实时超参数调优
Change LR, optimizer, loss function, and network architecture at runtime — see effects instantly.
运行时修改学习率、优化器、损失函数、网络结构 — 即时看到效果。
📐
Geometry & Physics
几何与物理仿真
SDF fields, cellular automata, simulations — use built-in 3D viewer or pixel-perfect 2D grids.
SDF 场、元胞自动机、仿真 — 使用内置 3D 查看器或像素级 2D 网格。